





2018/10/22
639
汽车整车技术需求、应用现状及发展趋势分析
发展趋势
(1)智能网联化
灯光控制模块将作为整车网络的一个节点,不再是孤立的灯具电子模块,通过与整车总线互联互通,大灯就有了自己的“思维”——只照亮该照亮的地方,灯具电子网联化控制会成为一个发展趋势。
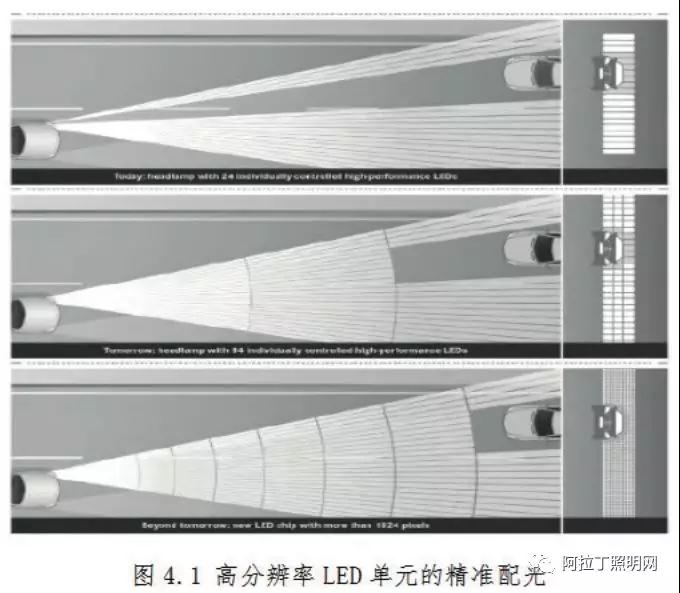
a. ADB(Adaptive Driving Beam)
实时自适应照明,是智能灯光发展的一个阶段,也是车用网联化的一个成功应用。从照明来讲,100像素以下的ADB足以实现车灯照明,每个像素均由单独LED芯片精确控制0%-100%的光强,对不同交通情况、天气状况、道路路况、自身车况所需要的配光分布做出调整。当有其他车辆进入车灯的光分布区域时,模块会有选择性地动态掩蔽对方车辆所在区域以防止眩目。
b. DLP(Digital Light Procession)
数字高分辨光处理技术,能提供万级以上,甚至百万级像素,能清晰投影复杂的、带有曲线的图形,确保光顺的截止线拐点,实现没有锯齿的截止线。DLP把光用到极致,在进行来车会车遮蔽的时候,确定需要遮蔽的区域以及满足要求的最小遮蔽窗口,减少照明范围的损失,适应未来有人/无人驾驶共同存在的环境。
在实现照明功能的同时,通过与摄像头、导航以及雷达技术的融合,以投影的方式实现信息的传递,增强车与人之间的互动、汽车与其他道路使用者的沟通。为后续智能驾驶提供更加安全和便捷的夜间行驶“光服务”,增强多种场景的安全驾驶体验。
(2)信息交互化
交互设计致力于为特定的汽车应用场景设计最优的解决方案。根据各个驾驶阶段的有用信息,做出合理决策和操作,通过影像、图形、声音等手段,在友好的交互界面上体现信息将会是信息交互化发展的必然趋势。以DLP为例,除了照亮该照亮的地方(高精度ADB遮蔽),甚至通过灯光给司机打信号,比如,交互信号有: 导航信息路面投射,限速提示,行人互动信息提示,行人位置跟踪提示,行驶意图信号投影,预测行驶区域提示等。信息交互化作为智能驾驶技术,将有效提高汽车驾乘的安全性,通过制造不同场景的交互方案,将用户的产品体验做到极致。
(3)用户界面个性化
用户界面是信息交互的表现途径,是让产品好用且使人愉悦的技术。用户界面设计时,既要了解用户在同产品交互时彼此的行为,又要了解用户和他们的期望,用户界面必须具有易用性和良好的用户体验性。在不影响安全、不违背法规的前提下,将来会有越来越多车型,开放用户界面的部分设置功能,将个性化配置权限释放给用户,用户通过本地或OTA方式更新个性化的配置。比如,交互信息的触发使能、触发条件、信息内容,个性化出行、音乐、智能停车、 电台推荐等。
技术需求
作为汽车照明的技术领先者,华域视觉拥有清晰的战略方向,建立了智能化模块的开发能力和体系,储备了前沿技术,可为客户提供创新、先进的产品及解决方案。
(1)ADAS(Advanced Driver Assistant system)
a. 嵌入式系统研发能力
电子模块开发离不开软件,嵌入式系统开发的能力建设,是车用零件向电气化、智能化、网联化进化的必要条件。
因智能模块的系统复杂性,需功能复杂的软硬件系统来支撑。目前市面上,典型的硬件系统通常基于3类方案,Mobileye EyeQ3或EyeQ4系统,FPGA(Field - Programmable Gate Array) 系统以及GPU(Graphics Processing Unit) 系统。Mobileye系统是最早的感知识别系统,但方案封闭,OEM和Tier1客户都无法实现个性化开发配置。因此,有较强开发实力和创新能力的Tier1和各初创公司都在积极探索FPGA方案或GPU方案,比较典型的,有MiniEye, 魔视智能,百度,华域视觉等。
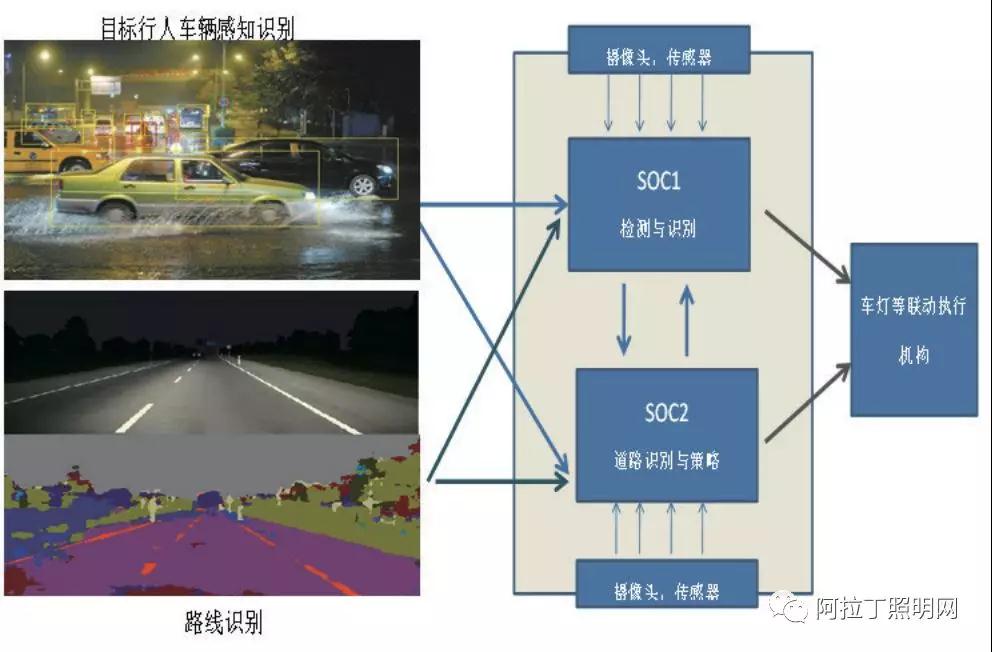
图 4.2 基于FPGA方案的硬件架构图 , 软件架构图
软件架构需具备跨平台性,实时性,图形化,视觉识别,可扩展性,安全性等。其对嵌入式系统的软硬件架构提出了标准化需求,通过拆分硬件和软件,创造出一种全新的模块化软件体系,为客户提供一个具有高度动态性和灵活性的平台,使研发人员专注于算法、模型等应用软件的开发,利于需求确认、仿真分析、快速原型、HIL验证,利于迭代改进,利于最终方案的快速冻结。
b. 机器视觉算法研发能力
用深度学习为机器视觉赋能,解决人类视觉的一个痛点:在黑暗或恶劣的天气条件下,人类具有有限的视力和反应能力。
深度学习的优势主要是自学习特征。深度学习如果有足够多的样本用于训练,就能够使系统的感知能力足够高; 传统的计算机视觉算法需要手工提取特征,很多时候还需专家知识、算法的鲁棒性设计,非常困难,很难保证鲁棒性,另外还需大量的调试、非常耗时。
深度学习一般包括四种类型的神经网络层:输入层、卷积层、池化层、输出层。随着网络层和节点数的增加,可以表达更细、更多的识别目标特征,网络结构层数越多,检测精度越精确。
卷积层和池化层是深度学习的核心处理层。卷积层主要是用于负责物体特征的提取;池化层主要是负责采样。
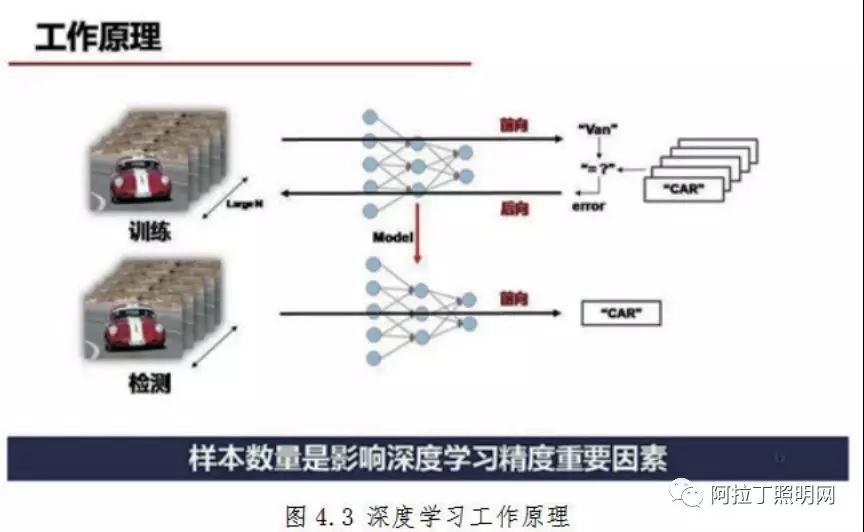
深度学习主要包括两方面内容:一个是训练,一个是检测。训练一般主要是离线进行,就是将采集到的样本输入到训练的网络中。训练网络进行前向输出,再利用标定信息进行反馈,最后输出模型,这个模型再导入到检测的网络中,检测网络就可以对输入的视频和图像进行检测和识别。


照明及LED产业风向标
欢迎莅临广州国际照明展览会!
主办单位官方微信

